
水陆起降自充气多旋翼无人机
实现无人机水陆自由起降,突破了传统无人机对起降环境的限制。




.jpg)



| 时间 | 项目 |
|---|---|
| 2021-至今 | 无扰式工业建设安全质量进度智能监管 |
| 2016-2018 | 输电侧智慧运维管控系统 |
| 2015-2018 | 龙巢无人机系统 |
| 2016-2018 | 物流无人机视觉导航安全保障系统 |
| 2013 | 电缆隧道机器人自主巡检方法研究 |
| 2014 | 激光定位导航技术研究 |
| 名称 |
|---|
| 基于混合控制的四旋翼无人机增稳控制方法 |
| 基于三维数字地图的电力巡检飞行机器人航线规划方法 |
| 基于全息投影技术的人机交互系统与方法 |
| 一种架空输电杆塔巡检飞行机器人的视点优选方法 |
| 基于PMS的电力线路激光雷达扫描数据应用分析系统 |
| 机器人(柔性自适应曲面移动-磁吸附) |
| 云打印装置 |
| 基于表观纹理结构的电力杆塔图像检测方法 |
| 面向AI实践和竞赛的无人机开源感知平台 |
| 一种电力塔杆图像语意分割方法 |
| 基于飞行机器人巡检视频的电力线故障诊断系统及方法 |
| 基于飞行机器人的架空电力线路巡检数据采集方法 |
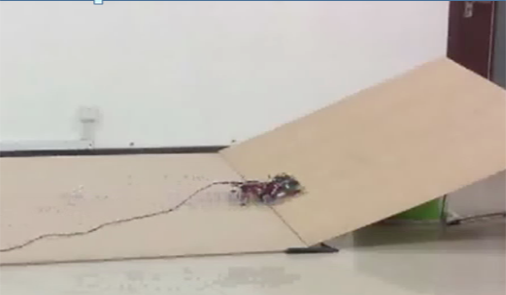
| 巡检飞行机器人斜面起飞控制方法 |
| 面向电力线巡检的飞行模拟系统 |
| 基于无线网络的电缆隧道内巡检机器人定位系统及方法 |
| 磁吸附式自适应壁面移动机器人 |
| 基于无线网络的电缆隧道内巡检机器人定位系统及方法 |
| 面向隧道巡检的输配电线缆检测方法 |
| 一种电缆隧道巡检机器人通信系统 |
| 飞行机器人输电设备观测位姿选择方法 |
| 隧道电缆巡检机器人的独臂轮式运动机构 |
| 电缆隧道环境参数监测系统 |
| 可水陆起降和自主充电的微型多旋翼飞行器 |
| 基于飞行机器人的架空电力线路巡检数据采集方法 |
| 基于多传感器融合技术的智能自主换壁机器人 |
| 基于表观纹理结构的电力杆塔图像检测方法 |
| 磁吸附式柔性自适应壁面移动机器人 |
| 一种3D点云物体的快速检测方法 |
| 飞行机器人电池电量监测系统 |
| 基于微型多旋翼无人直升机的电力杆塔智能巡检方法 |
| 输电设备的3D点云数据的空间特征提取方法 |
| 基于纹理聚类的电力塔杆图像描述方法 |
| 面向隧道电缆巡检机器人的轨道系统及测试方法 |
| 一种质点定位系统及方法 |
| 地空异构式变电站全方位巡检系统 |
| 飞行机器人输电设备观测位姿选择方法 |
| 一种自主切换壁面的爬壁装置 |
| 隧道电缆巡检机器人充电管理系统及方法 |
| 一种电力塔杆图像语意分割方法 |
| 电缆隧道环境参数监测系统 |
| 一种核电站设备故障检修的方法 |
| 基于飞行机器人巡检视频的电力线故障诊断系统及方法 |
| 一种多旋翼飞行机器人的高性能控制与计算系统 |
| 隧道电缆多路视频实时监控系统及方法 |
| 全息投影仪(人机交互) |
| 基于双MCU实现的飞行机器人系统 |
| 基于广域测量系统的变电站输电线路故障定位系统和方法 |
| 模糊逻辑与速度转换结合的电缆隧道巡检机器人防摆方法 |
| 机器人(多关节自适应曲面移动-磁吸附) |
| 一种巡检飞行机器人与架空电力线路距离预测和保持方法 |
| 模糊逻辑与速度转换结合的电缆隧道巡检机器人防摆方法 |
| 核电站作业多功能执行器及其控制方法 |
| 基于PMS的电力线路激光雷达扫描数据应用分析系统 |
| 面向电力线巡检的飞行模拟系统 |
| 输电线路与其周边物体的最小距离评估方法 |
| 一种电缆隧道巡检机器人通信系统 |
| 输电设备的3D点云数据的空间特征提取方法 |
| 一种无人机自主着陆的控制方法及装置 |
| 一种无人机电量补给装置 |
| 电网设备的图片审核方法及装置 |
| 无人机控制系统和无人机 |
| 基于影像处理的输电线路缺陷分析方法、装置和系统 |
| 无人机的输电线路空间距离的测量方法和装置 |
| 用于输电线路影像获取的无人机和无人机系统 |
| 一种输电线路缺陷识别方法、装置及存储介质 |
| 图像识别方法、装置及服务器 |
| 一种数据传输方法、服务器及存储介质 |
| 一种众包数据安全加密方法、服务器及存储介质 |
| 巡检路径规划方法、装置、电子设备及可读存储介质 |
| 一种电塔巡检方法及装置 |
| 一种无人机着陆方法、装置及存储介质 |
| 输电线检测仪及基于无人机的输电线检测系统 |
| 无人机集成控制系统和 |
| 无人机收纳仓(龙巢) |
| 无人机充电起降平台(智能运维系统-龙巢) |
实现无人机水陆自由起降,突破了传统无人机对起降环境的限制。

无人机上装载水喷洒装置并在飞行中进行对植物进行灌溉。
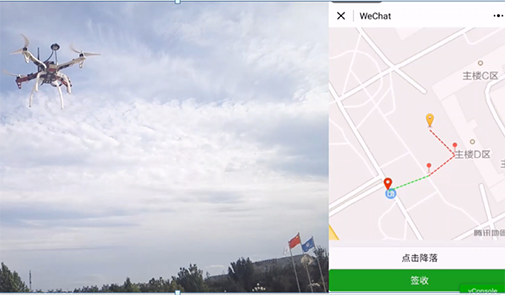
无人机进行物流服务,能够精准在地图上定位和显示配送信息。
实现机器人在多面物体上自由移动。

机器人吸附在水冷壁上,通过上下移动完成工作任务。
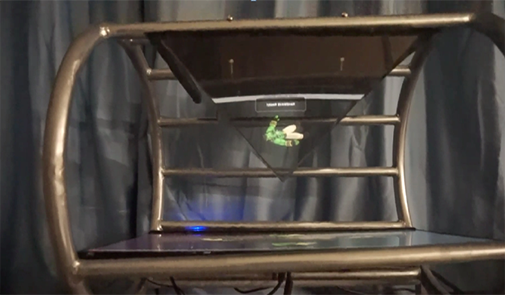
实现影像的3D呈现,更具观感体验。
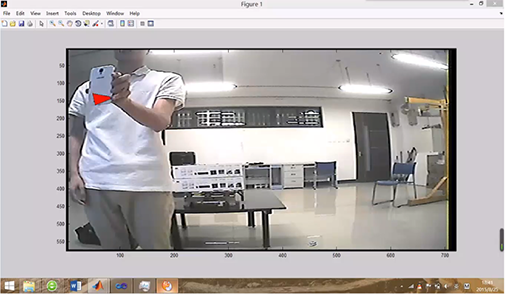
实现声源的自动定位并追踪。
将VR技术应用在工作中的新尝试。